4.1mm F4.0 M12 Low distortion lens
02/28/2026
Vari-focal CS mount lenses for smart traffic
03/01/2026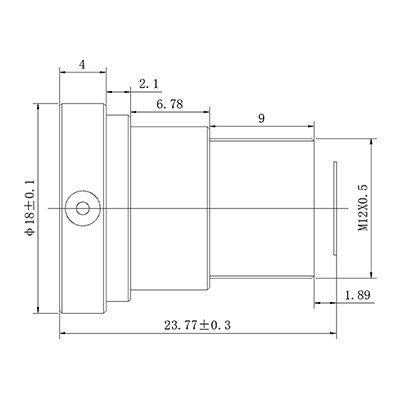
Table of Contents
Key Takeaways
- TOF lens works based on the time-of-flight principle, with fast depth acquisition speed, long detection distance and strong adaptability to light changes, suitable for dynamic and large-range robotic perception scenarios.
- Stereo Vision Lens mimics human eyes, offering precise short-range depth sensing, low cost, and rich detail for robots.
- The core difference between TOF lens vs Stereo Vision Lens lies in detection principle and performance trade-off: TOF prioritizes speed and environmental adaptability, while Stereo Vision prioritizes precision and cost performance.
- TOWIN’s M12/S-Mount low distortion lens and C-Mount industrial lens can be perfectly adapted to TOF and Stereo Vision systems, supporting customized design for different robotic sensor sizes and application requirements.
- The selection of the two lenses should be based on sensor size, application scene, precision requirements and budget, and the fusion scheme can be adopted for complex scene perception.
Introduction
3D depth sensing is the core of robotic environmental perception, and the choice of optical lens directly determines the accuracy, stability and adaptability of robotic perception. TOF lens vs Stereo Vision Lens has always been a key decision point for robotics developers when building 3D perception systems. As a professional optical lens supplier with a complete product line of M12/S-Mount, C-Mount and CS-Mount lenses, TOWIN has in-depth insights into the application characteristics of various lenses in robotic 3D depth sensing. This article will comprehensively compare TOF lens and Stereo Vision Lens from working principles, performance, adaptability and other aspects, and provide practical selection guidelines for robotic industry applications.
1. Core Working Principles
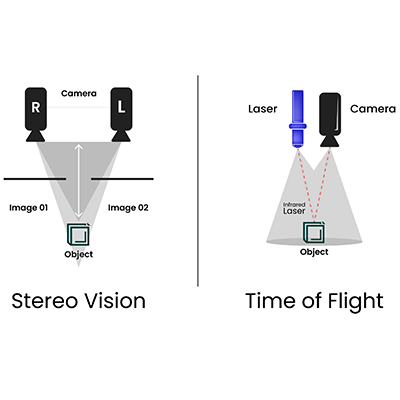
TOF and Stereo Vision Lenses differ fundamentally in 3D depth sensing principles, affecting their tech traits and uses.
1.1 TOF Lens: Time-of-Flight Based Distance Measurement
TOF (Time of Flight) lens is the core optical component of the TOF 3D sensing system, and its working principle is based on the light pulse flight time calculation:
- The light source emits continuous light pulses to the target scene, and the TOF lens collects the reflected light pulses.
- The system measures light pulse time difference to calculate sensor-target distance, generating a dense 3D depth map.
- The TOF lens needs to match the high-sensitivity optical design, which can accurately capture weak reflected light and ensure the accuracy of time difference measurement. TOWIN’s IR corrected lens adopts multi-coating technology, which can effectively improve the transmittance of infrared light and reduce light loss.
1.2 Stereo Vision Lens: Binocular Parallax Based 3D Reconstruction
Stereo Vision Lens is a dual-camera optical system that simulates human binocular vision principle, and its core is to realize depth measurement through binocular parallax:
- Two identical Stereo Vision Lenses, set at a fixed distance, simultaneously capture two 2D images of the same scene.
- The system calculates target depth by matching pixel points in two images and calculating parallax.
- The Stereo Vision Lens requires strict optical consistency (same focal length, distortion, transmittance), and TOWIN’s high-precision fixed focal lens can meet the strict matching requirements of the binocular system, reducing the subsequent algorithm correction cost.

4.1mm Wide-angle 12″ M12 TOF lens
2. Hardware Architecture Analysis
The hardware composition of TOF lens and Stereo Vision Lens systems is quite different, which directly affects the integration difficulty, volume and cost of the robotic perception module. The following is a detailed analysis of the hardware architecture of the two, combined with TOWIN’s lens product characteristics:
2.1 TOF Lens System Hardware Architecture
The TOF lens system is an active optical system with complex hardware but high integration. The core components include:
- TOF optical lens: The core component, TOWIN’s M12/S-Mount miniature lens or CS-Mount megapixel lens is the mainstream choice, which supports miniaturized integration of robotic sensors.
- Infrared light source (LED/VCSEL): Provides active light emission, matching the IR corrected lens of TOWIN to achieve efficient light transmission.
- Image sensor (TOF dedicated CMOS): Collects reflected light signals and converts them into electrical signals.
- Signal processing chip: Calculates the flight time of light pulses and generates depth maps in real time.
Key advantages of architecture: Small volume, easy integration with robotic small modules (such as robotic arm end, AGV navigation head), and no need for complex mechanical adjustment. TOWIN’s ø16, ø20 miniature M12 lenses are widely used in miniaturized TOF sensing modules of service robots.
2.2 Stereo Vision Lens System Hardware Architecture
The Stereo Vision Lens system is a passive optical sensing system with a simple hardware structure but high requirements for optical matching. The core components include:
- Dual Stereo Vision Lenses: Require strict optical consistency, TOWIN’s C-Mount industrial lens with flange focal distance of 17.526mm or CS-Mount lens with 12.526mm is the first choice for industrial robots, with low distortion and high resolution.
- Dual image sensors (general CMOS): Capture binocular images, support common industrial sensors with different sizes (1/2″, 2/3″, 3/4″).
- Baseline adjustment mechanism: Adjust the distance between the two lenses according to the detection range, suitable for different precision requirements.
- Image processing unit: Complete pixel matching and parallax calculation, and generate depth maps.
Key advantages of architecture: Low hardware cost, no need for an active light source, and can obtain both depth information and rich color texture information at the same time, which is convenient for subsequent target recognition of robots.
Hardware Architecture Comparison Table
| Hardware Indicator | TOF Lens System | Stereo Vision Lens System | TOWIN Adapted Lens Product |
| Optical system type | Active (with light source) | Passive (no light source) | IR corrected M12/CS-Mount lens |
| Core component number | 4+ (lens, light source, sensor, chip) | 3+ (dual lens, dual sensor, processing unit) | Full series M12/C/CS-Mount lenses |
| Integration difficulty | Low (miniaturized design) | High (optical consistency requirement) | Customized lens matching service |
| Volume | Small (suitable for mini modules) | Large (baseline distance occupation) | Miniature M12 lens for small robots |
| Hardware cost | High (dedicated sensor and chip) | Low (general CMOS sensor) | Cost-effective CS-Mount megapixel lens |
3. Performance Parameter Comparison
Performance is the core basis for selecting TOF lens vs Stereo Vision Lens in robotic applications. We compare the key performance parameters of the two from detection range, precision, frame rate, resolution and other aspects, and combine the actual application data of industrial robots:
Core Performance Parameter Comparison Table
| Performance Parameter | TOF Lens | Stereo Vision Lens | Typical Robotic Application Requirement |
| Detection range | 0.1-50m (long range) | 0.01-10m (short range) | AGV navigation (10-30m), robotic arm operation (0.1-2m) |
| Depth measurement precision | ±1-5%@5m (medium precision, stable with distance) | ±0.1-1%@2m (high precision, decreased with distance) | Precision grasping (±0.5% or less), rough navigation (±5% acceptable) |
| Frame rate | 30-60fps (high, real-time depth acquisition) | 15-30fps (medium, limited by algorithm matching) | Dynamic obstacle avoidance (≥30fps), static operation (≥15fps) |
| Depth map resolution | 320×240-1280×720 (dense, low pixel) | 640×480-2560×1440 (sparse, high pixel) | Environmental modeling (dense depth map), target recognition (high pixel texture) |
| Latency | <20ms (low, hardware-based calculation) | 50-100ms (high, algorithm-based calculation) | Fast moving robot (AGV/AMR, <30ms), static industrial robot (≥50ms) |
| Power consumption | Medium-High (active light source + dedicated chip) | Low (no light source + general algorithm) | Battery-powered service robot (low power consumption), industrial robot (unlimited power) |
Performance Summary
- TOF Lens: Its benefits—long-range detection, high frame rate, low latency—suit high-speed scenarios like AGV/AMR outdoor navigation.
- Stereo Vision Lens: Advantages include high precision and high-resolution texture at close range, making it suitable for high-precision grasping, assembly, and 3D scanning by robotic arms.
4. Environmental Adaptability
Robots are often applied in complex environments such as industrial workshops, outdoor scenes and logistics warehouses, and the environmental adaptability of TOF lens vs Stereo Vision Lens is a key factor determining the stability of the system. We analyze the adaptability of the two to light, temperature, dust, reflective surfaces and other common environmental factors:
4.1 TOF Lens: Strong Adaptability to Complex Light and Dynamic Environments
TOF lens is an active sensing system, which has natural advantages in environmental adaptability, especially in extreme light conditions:
- Strong anti-light interference: The active infrared light source is used, and the IR corrected lens of TOWIN is matched to filter out ambient light interference, and it can work stably in strong sunlight (outdoor) and low light (dark warehouse).
- Good adaptability to reflective surfaces: The dedicated signal processing algorithm can suppress the overexposure of reflective surfaces (such as metal, glass), and is suitable for industrial workshop scenarios with a lot of reflective objects.
- Temperature and dust resistance: TOWIN’s industrial grade C-Mount TOF lens adopts high-temperature resistant optical materials, which can work in the temperature range of -20℃ to 60℃, and the dust-proof design can adapt to the dusty environment of logistics warehouses.
- Weakness: Detection precision drops slightly in heavy rain/fog as infrared light scatters off droplets/particles.
4.2 Stereo Vision Lens: High Dependence on Light and Scene Texture
Stereo Vision Lens is passive, with limited adaptability, mainly restricted by light and scene texture:
- High light dependence: In low light or strong backlight conditions, the image contrast is reduced, the pixel matching failure rate is high, and the depth map is missing. It needs to be equipped with supplementary light, and TOWIN’s low light sensitive lens can improve the low light imaging effect.
- Dependence on scene texture: In the low-texture scene (such as white wall, smooth ground), the pixel matching is difficult, and the depth measurement failure occurs. It is not suitable for the empty workshop or open outdoor scene.
- Good adaptability to static environment: In the static scene with stable light and rich texture (such as electronic component assembly workshop), the precision is stable and the anti-interference ability is strong.
- Advantage: It is not affected by the scattering of light in rain/fog environment, and the short-range detection is more stable than TOF lens.
Environmental Adaptability Comparison List
- TOF lens is suitable for: Outdoor robots, AGV/AMR in dynamic workshops, service robots in public places.
- Stereo Vision Lens is suitable for: Industrial robotic arms in static workshops, precision assembly robots, indoor service robots with stable light and rich texture.
- Common adaptability of the two: Both can adapt to the general industrial environment (temperature 0-40℃, low dust), and TOWIN’s IP grade customized lens can further improve the dust and water resistance.
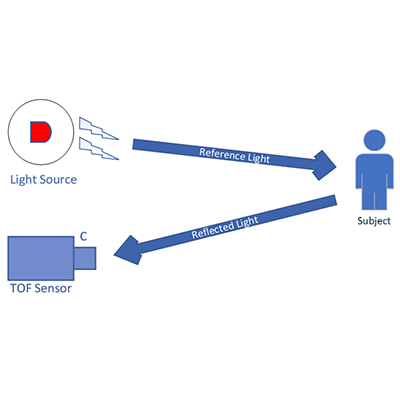
ToF sensor
5. Typical Application Scenarios in the Robotics Field
Applications of TOF Lenses
- AGV/AMR Autonomous Navigation: Real-time obstacle detection within 10–30m, low-latency dynamic obstacle avoidance.
- Outdoor Service Robots: Agricultural inspection, outdoor delivery, adaptable to strong light environments.
- Human-Robot Interaction Robots: Shopping mall/hospital service robots, gesture recognition and human tracking.
- Large-Scale Environment Modeling: Global 3D modeling for warehouse robots.
Applications of Stereo Vision Lenses
- High-Precision Grasping by Industrial Robotic Arms: Grasping of tiny, precise electronic components, automotive parts, etc.
- Precision Assembly Robots: Assembly of semiconductors and precision instruments.
- Indoor Fixed-Point Service Robots: Food delivery and cleaning robots.
- 3D Scanning and Inspection Robots: Industrial defect detection, 3D scanning of cultural relics.
Fusion Application Scenarios
For complex scenarios requiring both long-range navigation and close-range high-precision operations, the following can be used:
- TOF lenses for long-range dynamic navigation and obstacle avoidance
- Stereo vision lenses for close-range high-precision grasping and manipulation
- TOWIN can provide complete fusion system lens solutions.
6. Selection Suggestions
When selecting TOF lens vs Stereo Vision Lens for robotic 3D depth sensing, it is not a simple “either/or” choice, but needs to be based on actual application requirements. Combined with TOWIN’s rich lens product line, we put forward the following selection suggestions from four core dimensions:
6.1 Based on Detection Range and Precision Requirements
- Long range (>10m) + medium precision (±1-5%): Choose TOF lens, such as AGV navigation, outdoor robot obstacle avoidance, matching TOWIN’s M12/S-Mount 5MP F2 lens (S4621018F67) with large aperture and long detection range.
- Short range (<2m) + high precision (±0.1-1%): Choose Stereo Vision Lens, such as robotic arm grasping, precision assembly, matching TOWIN’s C-Mount low distortion lens (S6822023F) adapted to IMX335.
- Medium range (2-10m) + balanced precision: According to the light condition, select TOF lens (complex light) or Stereo Vision Lens (stable light).
6.2 Based on Environmental Light and Scene Characteristics
- Complex light (outdoor, strong backlight, low light) + low texture scene: Must choose TOF lens, match TOWIN’s IR corrected multi-coating lens to improve infrared light transmittance.
- Stable light (indoor workshop, fixed light) + rich texture scene: Choose Stereo Vision Lens, which has high cost performance, and match TOWIN’s low light sensitive lens if necessary.
- Rain/fog outdoor scene + short range detection: Choose Stereo Vision Lens; long range detection choose TOF lens with high-power infrared light source.
6.3 Based on Robotic Form and Integration Requirements
- Miniaturized robot (service robot, micro robotic arm): Choose TOF lens, TOWIN’s ø14/ø16/ø20 miniature M12 lens is small in size and easy to integrate.
- Industrial robot with large volume (heavy-duty robotic arm, fixed detection robot): Choose Stereo Vision Lens, TOWIN’s C-Mount industrial lens with stable performance and high precision.
- Battery-powered mobile robot: Prioritize Stereo Vision Lens with low power consumption; if TOF lens is needed, choose TOWIN’s small aperture low-power M12 lens.
6.4 Based on Budget and Cost Control
- Low budget + general precision requirements: Choose Stereo Vision Lens, the hardware cost is 30-50% lower than TOF lens, and match TOWIN’s cost-effective CS-Mount megapixel lens (CCL121625MPRF).
- High budget + high performance requirements: Choose TOF lens, suitable for high-end robotic applications such as humanoid robots and outdoor high-precision inspection robots, and TOWIN can provide customized TOF lens design.
- Batched robotic production: TOWIN has mass production capacity, which can realize the batch supply of TOF/Stereo Vision lenses and reduce the unit cost.
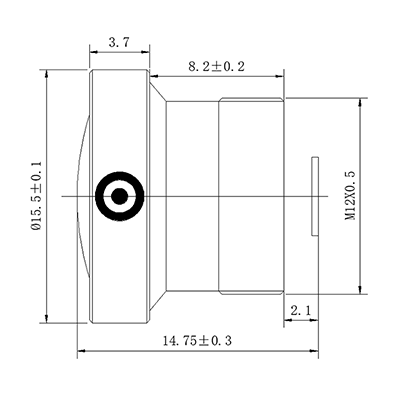
1.7mm Wide-Angle TOF lens
FAQs
Q1: How to solve Stereo Vision Lens failure in low-texture scenes?
A1: Solutions: 1. Add artificial texture (e.g., QR code); 2. Use TOWIN’s high-resolution low-distortion lens with improved matching algorithms. For better results, adopt TOF + Stereo Vision fusion scheme.
Q2: What are the key parameters for selecting a TOF lens?
A2: Core parameters: infrared transmittance (IR corrected multi-coating), low distortion, large aperture (F≤2.0), and focal length.
Q3: Can TOWIN provide customized lenses for TOF/Stereo Vision systems?
A3: Yes. TOWIN offers customized designs based on sensor size (1/2″, 2/3″, 3/4″), mount type (M12/C/CS), detection range and precision, supporting small-medium batch customization with fast delivery.
Q4: How to improve Stereo Vision Lens adaptability in outdoor scenes?
A4: Optimize in two ways: 1. Optically: Choose TOWIN’s low-light anti-glare lens with adjustable supplementary light; 2. Algorithmically: Use image enhancement and anti-texture-missing algorithms. For extreme light, adopt TOF + Stereo Vision fusion.
Conclusion
TOF lens vs Stereo Vision Lens are two core optical solutions for robotic 3D depth sensing, and there is no absolute advantage or disadvantage between them, only the adaptation to different application scenarios. TOF lens takes speed, range and environmental adaptability as the core advantages, and is the first choice for dynamic and complex scene perception of robots such as AGV/AMR and outdoor robots; Stereo Vision Lens takes short-range high precision, low cost and rich texture information as the core advantages, and is the optimal solution for static and high-precision operation of industrial robotic arms and precision assembly robots.
TOWIN, a pro lens supplier with M12/S/C/CS-Mount lines, deeply understands robotic 3D depth sensing apps. All our lenses adopt high-precision optical design and multi-coating technology, which can be perfectly adapted to TOF and Stereo Vision systems, and support customized design according to the sensor size, application scene and precision requirements of robots. Whether opting for TOF, Stereo Vision, or fusion, TOWIN offers pro, high-quality, fast lens solutions for stable 3D robotic perception.
If you have any questions about the selection of TOF lens vs Stereo Vision Lens for robotic applications, or need customized lens design services, please contact us at info@towin-elec.com, and our professional optical engineers will provide you with one-to-one technical support and solution design.