
Narrow bandpass filter integrated TOF lenses
02/13/2026Vibration-resistant lens mounts for rugged industrial use
02/15/2026
Table of Contents
- Introduction
- Core Working Principle of 360° Surround View Car Fisheye Lens Systems
- Imaging Principle of 360° Surround View Car Fisheye Lenses
- System Hardware Composition & Installation Layout
- Key Technical Parameter Analysis for 360° Surround View Car Fisheye Lenses
- Core Functions & Application Scenarios
- Fisheye Lens vs Regular Wide-Angle Lens
- FAQs
- Conclusion
Key Takeaways
- 360° surround view car fisheye lenses are the core optical component of automotive panoramic vision systems, enabling 180°+ ultra-wide field of view for full blind-spot coverage around vehicles.
- Their operation relies on ultra-wide-angle optical design with algorithmic distortion correction and multi-lens image stitching to form a seamless 360° top-down panoramic view.
- TOWIN offers automotive fisheye lenses based on M12/S-mount (miniature board lens) – the industry standard for vehicle-mounted optical systems, with IR correction and multi-coating technology.
- Critical technical parameters (FOV, resolution, aperture, distortion) directly determine the imaging quality and reliability of 360° surround view systems.
- Compared with regular wide-angle lenses, fisheye lenses deliver unbeatable field of view and installation flexibility for automotive 360° surround view applications.
- TOWIN provides customized R&D, fast selection and shipping for automotive fisheye lenses, complying with the brand’s core principles: PROFESSIONAL-ALL-EASY-FAST.
Introduction
The 360-degree surround view system (also known as bird’s-eye view system) has become a core safety feature for modern passenger and commercial vehicles, eliminating driving and parking blind spots and drastically reducing collision risks. At the heart of this system is the car fisheye lens – an ultra-wide-angle optical lens that captures a massive field of view around the vehicle.
As a leading optical lens manufacturer in China, TOWIN specializes in the design and production of vehicle-mounted fisheye lenses, part of our comprehensive M12 lens portfolio (miniature lenses for automotive, surveillance and industrial applications). Our automotive fisheye lenses integrate IR correction, multi-coating technology and high-resolution imaging, and support full customization to meet the specific requirements of 360° surround view system integrators. With our PROFESSIONAL-ALL-EASY-FAST service, we ensure fast lens selection, production and global shipping for our international clients.
Core Working Principle of 360° Surround View Car Fisheye Lens Systems
The 360-degree surround view car fish-eye lens system (also known as AVM, Around View Monitor) is a key advanced driving assistance system (ADAS) for modern vehicles. Its core working principle is to collect images around the vehicle through four ultra-wide-angle fish-eye cameras, then complete distortion correction, perspective transformation, image stitching and fusion via the ECU image processing unit, and finally generate a seamless 360° bird’s-eye top-down view displayed on the vehicle’s central control screen in real time. This provides drivers with an all-round field of view, effectively eliminating driving blind spots and improving driving safety and convenience. The entire processing delay is usually controlled within 0.1 seconds to ensure real-time performance and driving safety.
1. Core Components of the System
| Components | Functions | Key Parameters |
| 4×Fish-Eye Cameras | Collect front, rear, left and right images of the vehicle | Wide angle 190°-230°, 1080P high definition, IP6K9K protection grade, low illumination performance |
| Surround View ECU | Core of image processing | Built-in GPU/ISP chip, responsible for algorithm operation and signal processing |
| Vehicle-mounted Display Screen | Image output terminal | Real-time display of 360° panoramic view and dynamic trajectory lines |
| CAN/LIN Network | Data communication channel | Synchronize vehicle dynamic information such as vehicle speed and steering angle |
| Calibration System | Foundation of parameter calibration | Checkerboard/calibration cloth, used to calculate internal and external parameters of cameras |
2. Core Working Process (Six Key Steps)
① Image Collection: All-Round Visual Coverage
Four fish-eye cameras are respectively installed under the front grille, rear tailgate, and left and right rearview mirrors, arranged at an obliquely downward angle. They synchronously collect images around the vehicle at 30 frames per second, covering a 360° dead-angle-free area. The original images have severe barrel distortion (fish-eye effect), where straight lines become curves and edge objects are deformed.
② Camera Calibration: Establish Coordinate Mapping Benchmark
This is the premise for the accurate operation of the system, which is divided into intrinsic parameter calibration and extrinsic parameter calibration:
- Intrinsic parameter calibration: Determine the camera’s own parameters (focal length, distortion coefficient, etc.) by fitting with fisheye models such as Kannala-Brandt.
- Extrinsic parameter calibration: Calculate the relative position and attitude between the camera and the vehicle body coordinate system (rotation matrix R, translation vector T).
- Calibration method: Use a standard checkerboard or special calibration cloth, and the system automatically identifies feature points to calculate the transformation matrix.
Inaccurate calibration will lead to stitching misalignment, ghosting and other problems, affecting the user experience.
③ Distortion Correction: Restore Real Images
Based on the distortion parameters obtained from calibration, the inverse mapping algorithm is executed by the ISP chip. Polynomial model or look-up table method is adopted to restore the spherical distorted images to normal perspective proportion. At the same time, color calibration is performed to eliminate color difference between different cameras and ensure image consistency. The edge error of the corrected image is controlled within ±5% to ensure the accuracy of details.
④ Perspective Transformation: From Oblique View to Bird’s-Eye View
The homography transformation algorithm is applied to project the images of the four obliquely downward viewing angles onto a virtual top-down plane. The core formula is: u’ = H×u (u is the original image coordinate, H is the transformation matrix, u’ is the bird’s-eye view coordinate). This step converts the irregular original images into a unified top-down view, which conforms to human driving habits.
⑤ Image Stitching and Fusion: Generate Seamless Panorama
This is the most core technical link of the system, which is divided into three steps:
- Feature point extraction: Use SIFT/ORB algorithm to identify corner points, edges and other feature points in the overlapping area of adjacent images.
- Accurate matching: Calculate the offset and rotation angle between images through feature point descriptor matching.
- Fusion to eliminate gaps: Adopt Alpha Blending technology to achieve smooth transition in the overlapping area and eliminate stitching traces.
Finally, a complete bird’s-eye view image containing the 3D model of the vehicle is generated, with the vehicle body displayed in the center and the surrounding environment images around it.
⑥ Dynamic Overlay and Output: Enhance Driving Assistance
Fuse CAN bus data to real-time calculate dynamic trajectory lines, which change with the rotation of the steering wheel to predict the driving path of the wheels. Overlay obstacle distance markers, parking auxiliary lines and other information to improve practicality. Output to the central control screen to provide an intuitive 360° panoramic view, assisting in parking and narrow road passage.
3. Detailed Explanation of Key Technical Principles
① Imaging Principle of Fish-Eye Lens
Adopting a short focal length and large field of view design, it uses spherical refraction to focus light above 180° on the sensor. The imaging models are divided into equidistant projection, equisolid angle projection, etc. The system needs to select the corresponding correction algorithm according to the lens type. Advantage: A single lens has a wide coverage, reducing the number of cameras; Disadvantage: Severe distortion requires complex correction.
② Core Algorithm of Distortion Correction
- Polynomial distortion model: r = fθ + k₁r³ + k₂r⁵ + … (r is the image radius, θ is the incident angle, k is the distortion coefficient)
- Look-up table method: Establish a distortion-correction mapping table through calibration data, and query and replace pixel values in real time.
- Inverse mapping technology: Reverse calculate the original image coordinates from the corrected image coordinates to avoid pixel loss.
③ Mathematical Model for Bird’s-Eye View Generation
Assuming the ground is a plane, the perspective projection transformation is used to convert the camera coordinate system (C) to the vehicle body coordinate system (V). The transformation matrix H includes rotation, translation, scaling and other parameters, which are obtained accurately through calibration. The transformation matrices of the four cameras are calculated separately to ensure the accurate position of each image in the bird’s-eye view.
④ Real-Time Guarantee Technology
- Hardware acceleration: The ECU has a built-in dedicated image processing chip to perform parallel operations on multi-frame data.
- Algorithm optimization: Pyramid hierarchical matching is adopted to reduce the amount of calculation and improve stitching speed.
- Data synchronization: Ensure that the four cameras expose simultaneously through hardware trigger signals to avoid image misalignment.
4. Core Value and Application Scenarios of the System
- Eliminate visual blind spots: Cover areas near the front of the car, rear of the car and wheels that cannot be seen by traditional rearview mirrors.
- Assist precise parking: Intuitively display the distance between the vehicle and the parking space and obstacles, reducing the risk of scratches.
- Narrow road passage: Provide lateral distance reference to help judge whether the vehicle can pass through narrow road sections.
- Enhance safe driving: Real-time monitor the surroundings when driving at low speed, and timely detect pedestrians and non-motor vehicles.
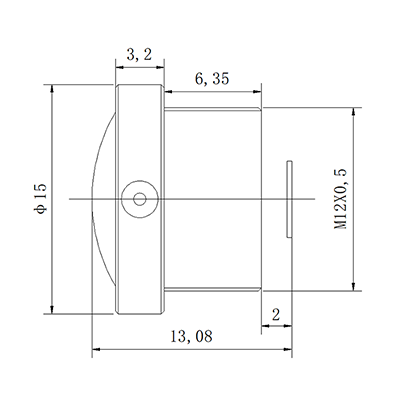
IP69K Automotive Fisheye lens
Imaging Principle of 360° Surround View Car Fisheye Lenses
The core working principle of the 360° surround view car fisheye lens system is based on the ultra-wide-angle optical imaging of automotive-grade fisheye lenses. Relying on the collaborative collection of a four-directional fisheye camera array, combined with dual optimization of optical pre-correction and on-board digital algorithms, it achieves distortion correction, seamless stitching and panoramic fusion, outputting a 360° dead-angle-free surround image. Its operation logic is summarized as: optical acquisition as the foundation, signal conversion as the bridge, algorithm processing as the core, and software-hardware collaboration as the key—all indispensable.
1. Ultra-Wide-Angle Optical Full-Range Acquisition: Achieving Dead-Angle-Free Light Signal Capture Around the Vehicle
The system is equipped with one automotive-grade fisheye lens at the front, rear, left and right of the vehicle body. The lens adopts an exclusive structure of short focal length (1.0~2.8mm) + large optical aperture. Based on the principle of spherical optical refraction, it converges a wide range of light around the vehicle onto the CMOS/CCD image sensor of the camera. Its diagonal field of view can reach 180°, and the horizontal field of view is ≥150°. A single lens can independently cover nearly 1/4 of the blind area around the vehicle, and the four lenses work together to achieve complete collection of full-range light signals around the vehicle.
2. Multi-Lens Array Collaborative Matching: Laying the Optical Foundation for Subsequent Stitching
The four fisheye lenses adopt unified automotive-grade optical parameters (consistent focal length, field of view, resolution, and light transmittance), and adjacent lenses are designed with 10%~20% overlapping field of view (such as the front left lens and the front lens, the right rear lens and the rear lens). The unified parameters ensure that the light intensity, image magnification ratio and color reproduction of the overlapping area are highly consistent, and the overlapping field of view completely solves the problem of imaging blind spots between single lenses, which is the core optical premise for realizing subsequent seamless image stitching.
3. Optical Pre-Correction: Reducing the Inherent Distortion of Fisheye Lenses from the Source
The ultra-wide-angle design causes fisheye lenses to have inherent barrel distortion (the image presents an inwardly concave spherical deformation). The automotive-specific fisheye lenses supporting the system achieveoptical pre-correction of distortion during the lens group design stage by integrating aspherical glass lenses, high-refractive-index optical plastic lenses and optical diaphragm adjustment, reducing the original distortion rate of the lens from more than 100% to a controllable range of 30%~50%. This step reduces distortion at the physical level, greatly reducing the correction pressure of subsequent digital algorithms and avoiding the loss of image details caused by excessive digital processing.
4. Photoelectric Signal Conversion: Completing the Conversion from Optical Image to Digital Signal
The light signals collected by the fisheye lens are imaged into analog electrical signals on the image sensor, which are then converted into digital image signals recognizable by the on-board system through A/D (analog-to-digital) conversion of the chip. The signal quality of this link is determined by the core optical performance of the fisheye lens — the industry automotive-grade standard is MTF value ≥0.3 at 50lp/mm (to ensure rich image details), and low optical noise (reducing stray light and glare) can improve the signal-to-noise ratio of the image, providing high-quality digital materials for accurate algorithm processing.
5. Core Processing of On-Board Digital Algorithms: Realizing the Final Formation of Panoramic Images
This is the core link of the 360° surround view system. The on-board main control chip performs three key steps of processing on the digital image signals of the four lenses through exclusive algorithms:
- ① Precise Distortion Correction: Perform precise digital correction on the remaining distortion after optical pre-correction to restore the real object proportion and spatial perspective;
- ② Feature Point Matching and Seamless Stitching: The algorithm automatically identifies the image feature points in the overlapping area of each lens, completes precise calibration and seamless stitching, and eliminates image faults between lenses;
- ③ 360° Panoramic Fusion: Integrate the stitched four parts of the image into a full-range surround image from a top-down perspective, adapting to the display ratio of the on-board display terminal.
6. Real-Time Image Output: Realizing Visual Presentation of the Environment Around the Vehicle
The 360° seamless surround panoramic image processed by the algorithm is transmitted to display terminals such as the central control screen and instrument panel in real time through the on-board bus, realizing dead-angle-free and real-time visualization of the environment around the vehicle, and providing intuitive spatial reference for the driver’s operations such as parking, low-speed driving and narrow road passage.

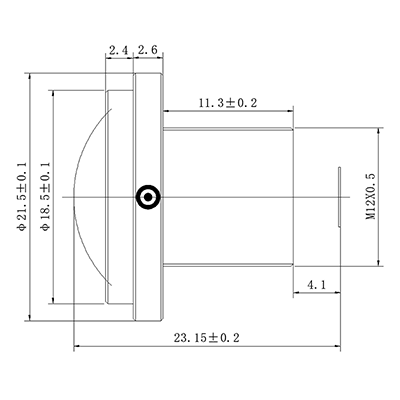
IR corrected 1.17mm M12 Fisheye CCTV lens
System Hardware Composition & Installation Layout
1. Core Hardware Components
The 360° surround view system’s hardware is a modular combination, with the fisheye lens as the most critical optical unit. TOWIN’s lenses are fully compatible with standard system components:
- Optical lens unit: TOWIN M12/S-mount automotive fisheye lenses (core component) – high-resolution, IR-corrected, miniaturized for easy on-board installation.
- Image sensor module: Matches the fisheye lens (e.g., 5MP high-resolution sensors, compatible with TOWIN’s 1/2″ 5MP F2 fisheye lens models).
- Image acquisition & processing unit: On-board ECU/ dedicated image processing chip for signal conversion, distortion correction and image stitching.
- Display terminal: Vehicle central control screen/ instrument panel screen for real-time panoramic image display.
- Power & transmission module: For stable power supply and high-speed signal transmission between components.
2. Standard Installation Layout
For most passenger and commercial vehicles, the 4-lens layout is the industry standard (custom layouts available for special vehicles), with TOWIN’s miniature M12/S-mount fisheye lenses ideal for this compact installation:
- Front lens: Mounted at the center of the front bumper (captures the front road and obstacle area).
- Rear lens: Mounted at the center of the trunk/ tailgate (captures the rear parking area and rear obstacles).
- Left & right lenses: Mounted at the bottom of the left and right side mirrors (capture the side blind spots, wheel areas and adjacent lanes).
This layout ensures full coverage of the vehicle’s 360° surrounding area with no visual blind spots, and the miniaturized M12/S-mount design from TOWIN avoids excessive modification of the vehicle body.
Key Technical Parameter Analysis for 360° Surround View Car Fisheye Lenses
Technical parameters are the key to evaluating the performance of automotive fisheye lenses. TOWIN optimizes all core parameters for the 360° surround view application scenario, and offers customizable specs for different vehicle types and system requirements. The following table outlines the critical parameters, their definitions, core application requirements and TOWIN’s standard/ customizable specs:
| Technical Parameter | Core Definition | Key Requirements for 360° Surround View | TOWIN Standard/ Customizable Specs |
| Field of View (FOV) | The maximum angular range a lens can capture | ≥150° (horizontal), ideal 180° for full coverage | 150°-190° (customizable for front/ rear/ side lenses) |
| Resolution | The number of pixels the lens can support | ≥2MP (basic), 5MP (high-definition) for clear imaging | 2MP/4MP/5MP (including 1/2″ 5MP F2 high-res models) |
| Aperture (F-value) | Determines light intake (smaller F = more light) | F≤2.8 (night vision), F2.0 for ultra-low light conditions | F2.0/F2.4/F2.8 (TOWIN 1/2″ 5MP F2 is a flagship model) |
| Mount Type | Lens installation interface | Miniaturized, standard industrial interface for easy integration | M12/S-mount (M12X0.5 thread) – the industry standard for automotive on-board lenses |
| Distortion Rate | The degree of barrel distortion | Predictable & controllable (≤150% for algorithm correction) | Optimized controlled distortion (algorithmic correction compatible) |
| IR Correction | Infrared light transmittance correction | Mandatory (day/night dual-use) | 100% IR corrected (all TOWIN automotive fisheye lenses) |
| Focal Length | The distance from lens to image sensor | Short focal length (≤2mm) for ultra-wide FOV | 1.0mm-2.0mm (short focal for ultra-wide angle) |
| Coating | Optical lens surface coating | Anti-reflection, anti-glare | Multi-coating (Muti-Coating) for low reflection and high contrast |
Core Functions & Application Scenarios
1. Core Functions of 360° Surround View Car Fisheye Lens Systems
Powered by high-performance TOWIN fisheye lenses, the 360° surround view system delivers the following core safety and convenience functions for drivers:
- 360° blind-spot free vision: Full coverage of the vehicle’s front, rear, left and right areas, eliminating blind spots in parking, low-speed driving and lane changing.
- Intelligent parking assistance: Clear panoramic view of the parking space, enabling precise parallel parking and reverse parking (critical for large vehicles such as SUVs and trucks).
- Low-speed collision avoidance: Real-time monitoring of obstacles (pedestrians, small vehicles, curbs) in the surrounding area during low-speed driving, reducing scratch and collision risks.
- Day/night dual-use imaging: IR correction and large aperture (F2.0) from TOWIN lenses ensure clear imaging in low-light/night conditions, no loss of visual quality.
- On-board video recording: Synchronous recording of panoramic images for accident evidence collection and vehicle anti-theft.
- Compact installation: TOWIN’s M12/S-mount miniature fisheye lenses require minimal vehicle modification, with easy integration into original vehicle systems.
2. Main Application Scenarios
TOWIN’s 360° surround view car fisheye lenses are designed for all types of motor vehicles, with customizable specs for different application scenarios:
- Passenger vehicles: Sedans, SUVs, MPVs (OEM/aftermarket 360° surround view system upgrades).
- Commercial vehicles: Trucks, buses, delivery vans (addressing large vehicle blind spots and parking challenges).
- Special vehicles: Fire trucks, ambulances, engineering vehicles (enhancing safety in emergency and complex working environments).
- New energy vehicles (NEVs): EVs and hybrid vehicles (integrated with intelligent driving assistance systems (ADAS)).
Fisheye Lens vs Regular Wide-Angle Lens (For Automotive 360° Surround View)
For automotive 360° surround view applications, fisheye lenses are the optimal choice, far outperforming regular wide-angle lenses in key performance and practicality. The following comparison table clearly outlines the differences:
| Comparison Dimension | Car Fisheye Lens (TOWIN M12/S-mount) | Regular Wide-Angle Lens |
| Field of View (FOV) | 150°-190° (ultra-wide, single lens covers a large area) | 60°-120° (narrower, multiple lenses needed for coverage) |
| Distortion | Inherent barrel distortion (predictable, algorithm-correctable) | Minimal distortion (no correction needed, but FOV is limited) |
| Installation Space | Miniaturized (M12/S-mount), compact, easy on-board installation | Larger volume, requires more installation space |
| 360° Coverage Efficiency | 4 lenses for full 360° coverage (standard layout) | 6+ lenses for partial coverage (high cost, complex wiring) |
| Light Intake | Large aperture (F2.0) + IR correction (excellent night vision) | Smaller aperture (F3.5+), poor low-light performance |
| Automotive Compatibility | Optimized for on-board vibration, temperature and environmental conditions | Not designed for automotive harsh environments |
| Integration Ease | M12/S-mount (industry standard), fully compatible with on-board sensors | Non-standard interfaces, complex integration |
FAQs
Q1: What is the most commonly used mount type for 360° surround view car fisheye lenses?
A: The M12/S-mount (M12X0.5 thread) is the global industry standard for automotive on-board fisheye lenses. TOWIN’s automotive fisheye lenses are all based on M12/S-mount – a miniature “board lens” that can be directly threaded into the PCB camera mount, enabling compact installation and easy integration with on-board image sensors.
Q2: How does TOWIN ensure the night vision effect of car fisheye lenses for 360° surround view systems?
A: TOWIN integrates two core technologies to ensure excellent night vision performance: ① Large aperture design (e.g., F2.0) for maximum light intake in low-light conditions; ② 100% IR correction + multi-coating technology to eliminate infrared light interference and reduce light reflection, ensuring clear, high-contrast imaging in both daytime and nighttime.
Q3: What is the delivery speed of TOWIN’s 360° surround view car fisheye lenses?
A: TOWIN adheres to the FAST core principle – we have a large inventory of standard M12/S-mount automotive fisheye lenses (e.g., 5MP F2 models) for fast selection and shipping. For custom lenses, our efficient production line in China ensures the shortest lead time, and we provide global fast shipping for all orders.
Q4: Are TOWIN’s car fisheye lenses suitable for harsh automotive working environments?
A: Yes. TOWIN’s automotive fisheye lenses are designed and manufactured to withstand the harsh on-board environment, including resistance to vibration, high/low temperature, humidity and dust – fully meeting the industrial and automotive industry quality standards for on-board optical components.
Conclusion
The 360-degree surround view car fisheye lens is the unsung hero of modern automotive safety, turning the impossible full blind-spot coverage into reality with its ultra-wide-angle optical design and algorithmic correction technology. As a professional optical lens supplier in China, TOWIN Lens has focused on the R&D and production of automotive fisheye lenses for years, with a complete product portfolio based on the industry-standard M12/S-mount, integrating high resolution (5MP), large aperture (F2.0), IR correction and multi-coating technology.
Our core brand principles – PROFESSIONAL-ALL-EASY-FAST – ensure that every international client can find the right automotive fisheye lens for their 360° surround view system, with support for full customization, fast selection and global shipping. Whether you are an OEM automotive manufacturer, a 360° surround view system integrator or an aftermarket supplier, TOWIN Lens is your reliable long-term optical partner for automotive fisheye lens solutions.
Contact TOWIN Lens Today
For custom quotes, product selection or technical consultation for 360° surround view car fisheye lenses:
Email: info@towin-elec.com
We provide fast response and professional one-stop optical lens solutions for global clients.


{kind=link}